電話:0755-29030191
 東么川服務領域
東么川服務領域
 智能設備制造商
智能設備制造商
東么川品牌服務全國:產品廣泛應用于數控機床、醫療設備、紡織印刷、雕刻機、激光打標機、機器人等多個行業服務。
 OMD/OEMD廠家
OMD/OEMD廠家
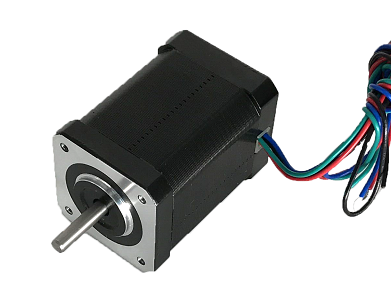
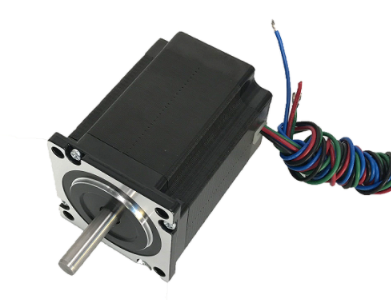
品牌擁有多年的無刷電機以及伺服驅動器研發生產經驗,為廣大代理商提供優質的步進、無刷電機及伺服驅動器,產品齊全品質保障。
 對外貿易
對外貿易
東么川步進驅動器采用國外先進技術生產,為廣大經銷商、備件提供商能夠提供全方位的技術支持他們都選擇了與東么川品牌合作。
 生產廠家
生產廠家
東么川擁有600平米的電機生產組裝車間,獨立自主的研發生產步進驅動器,直流無刷電機等,能夠根據客戶要求提供個性化批量定制。
 產品中心應用方案
產品中心應用方案
















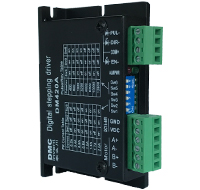
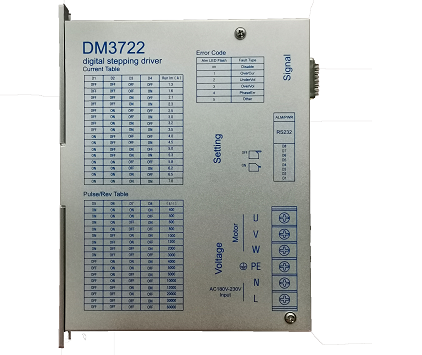
 深圳市東么川伺服控制技術有限公司是一家專門從事伺服控制產品技術研發、生產和銷售的高技術廠商,公司擁有一支勇于創新、追求卓越、經驗豐富的研發專家團隊專注于數字馬達控制,經過多年的潛心研發,無論在硬件設計還是軟件核心算法技術上取得了重大突破,成為行業少數擁有真正自主技術核心的公司,其中,數字式步進驅動器FD系列及DM系列為自主核心技術成功應用的DSP技術產品,FD系列產品在低速,中速,高速性能方面優于業內各家數字式產品。產品廣泛應用于數控機床、醫療設備、紡織印刷、雕刻機、激光打標機、激光內雕機、電子設備、剝線機、包裝機械、廣告設備、貼標機、恒速應用、機器人等多個行業。公司DM系列產品解決了高速性能及噪聲方面問題,響應更快速,成本更低.為客戶在低成本應用領域提供了很好的產品。DM系列將直接淘汰傳統雙極垣流……
深圳市東么川伺服控制技術有限公司是一家專門從事伺服控制產品技術研發、生產和銷售的高技術廠商,公司擁有一支勇于創新、追求卓越、經驗豐富的研發專家團隊專注于數字馬達控制,經過多年的潛心研發,無論在硬件設計還是軟件核心算法技術上取得了重大突破,成為行業少數擁有真正自主技術核心的公司,其中,數字式步進驅動器FD系列及DM系列為自主核心技術成功應用的DSP技術產品,FD系列產品在低速,中速,高速性能方面優于業內各家數字式產品。產品廣泛應用于數控機床、醫療設備、紡織印刷、雕刻機、激光打標機、激光內雕機、電子設備、剝線機、包裝機械、廣告設備、貼標機、恒速應用、機器人等多個行業。公司DM系列產品解決了高速性能及噪聲方面問題,響應更快速,成本更低.為客戶在低成本應用領域提供了很好的產品。DM系列將直接淘汰傳統雙極垣流……























 地址 ADDRESS
地址 ADDRESS