服務支持
產品中心
聯系我們

深圳市東么川伺服控制技術有限公司
電話:0755-29030191
郵箱:983847136@qq.com
地址:深圳市龍華區東環一路天匯大廈D棟306房
步進電機和伺服電機對比,各有千秋
發布時間:2020-10-10 06:31:24
在許多工業機械的運用場所中,步進電機都是不可或缺電動驅動產品。在其中,伺服電機、步進電機也是電動機種類中的一種。
步進電機是一種將電脈沖轉換為角位移的電動執行器,伺服電機則就是指在伺服控制系統中操縱機械設備元器件運行的發動機,是一種補貼電機間接性變速裝置。那麼您了解伺服電機和步進電機的差別在哪兒嗎?
嚴格意義上來說,步進電機也歸屬于伺服電機的一種,伺服電機是專指能夠 精準可控的電動機(指轉速比、拐角、行程安排可控性這些),包含直流伺服電機、交流伺服電機、步進電機,但不嚴苛的時候大部分指交/直流伺服電機。
與交直流伺服電機對比,步進電機較大的特性是拐角、轉速比均可便捷的精準操縱,自動控制系統簡易,它選用次序單脈沖驅動器,先后序在電機定子間接性入不一樣浪涌電流順序,造成 步進電機的唇間磁性差別而帶動電機轉子旋轉,操縱單脈沖的總數立即相匹配著電機轉子的齒計步,因而不嚴格管理時,能夠 省去相位傳感器,并且轉停后有鎖緊工作能力,操縱起來比交直流電動機非常容易得多,因此 是最常見的伺服電機,尤其是在小輸出功率、小容積的電機控制機械設備居于執政影響力。
但步進電機較大 的缺陷是轉距較為小、輸出功率較為小(較大 也僅僅在KW級別),旋轉的平穩性也算不上好,一般用以中小型機電工程系統軟件。
而交直流伺服電機的關鍵優勢是輸出功率大(達到百余kw)、轉距大、速率范疇極高(能夠 很慢還可以很快),并且轉距絲滑、顫動小,一般用以大中型、性能卓越數控機床,但交/直流伺服控制系統的操縱都很繁雜,都必須精準的拐角感應器或是相位傳感器做閉環控制系統,優化算法繁雜,并且成本費昂貴、容積巨大。
直流伺服電機一般選用工作電壓操縱,極少數還可以選用電流量操縱,工作電壓或電流量與電動機的轉速比中間存有著一定的函數關系,自動控制系統依據轉角傳感器意見反饋的數據信號,操縱這一電動機工作電壓,最終做到操縱電動機的轉速比或拐角。
步進電機和伺服電機的不一樣取決于:
1、線性度不一樣;
2、操縱方法不一樣:一個是開環控制,一個是閉環控制系統;
3、低頻特點不一樣:步進電機有低頻震動狀況,伺服電機運行十分穩定;
4、矩頻特點不一樣;
5、負載工作能力不一樣;
6、運作特性不一樣;
從上邊能夠 看得出,交流伺服控制系統在特性層面好于步進電機,因此 伺服電機比步進電機價錢高。
步進電機做為一種開環控制的系統軟件,和當代數據控制系統擁有 實質的聯絡。在現階段中國的數據自動控制系統中,步進電機的運用十分普遍。伴隨著全數顯式交流伺服控制系統的出現,交流伺服電機也愈來愈多地運用于數據自動控制系統中。以便融入計算機控制的發展趨向,健身運動自動控制系統中大多數選用步進電機或全數顯式交流伺服電機做為實行電機。盡管二者在操縱方法上類似(單脈沖和方位數據信號),但在性能指標和運用場所上存有著很大的差別。現就二者的性能指標作一一較為。
一、線性度不一樣
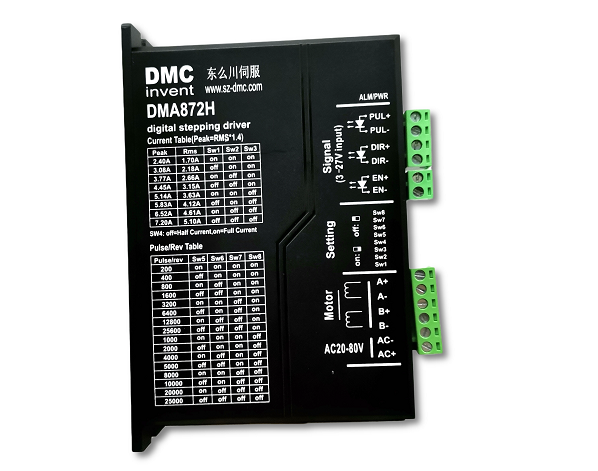
兩相混合式教學步進電機橫距角一般為1.8°、0.9°,五相混合式教學步進電機橫距角一般為0.72°、0.36°。也是有一些性能卓越的步進電機根據細分化后橫距角更小。如東么川企業(MOONS‘)生產制造的二相混合式教學步進電機配搭其SR系列產品步進驅動器,其橫距角可根據撥碼有16檔細分化能夠 挑選1.8°、0.9°、0.45°、0.36°、0.225°、0.18°、0.1125°、0.09°、0.072°、0.05625°、0.045°、0.036°、0.028125°、0.018°、0.0144°、0.014°,適配了兩相和五相混合式教學步進電機的橫距角。
交流伺服電機的線性度由電動機軸后端旋轉編碼器確保。以M2交流伺服電機為例子,針對帶2500線增加量式伺服電機的電動機來講,因為控制器內部選用了四內存超頻技術性,其單脈沖劑量為360°/10000=0.036°。針對帶17位伺服電機的電動機來講,控制器每接受131072個單脈沖電動機轉一圈,即其單脈沖劑量為360°/131072=0.0027466°,是橫距夾角1.8°的步進電機的單脈沖劑量的1/655。
二、低頻特點不一樣
步進電機在低速檔的時候容易出現低頻震動狀況。
振動頻率與負荷狀況和控制器特性相關,一般覺得振動頻率為電動機滿載跳起頻率的一半。這類由步進電機的原理所決策的低頻震動狀況針對設備的一切正常運行十分不好。當步進電機工作中在低速檔時,一般應選用減振技術性來擺脫低頻震動狀況,例如在電動機上添液壓阻尼器,或控制器上選用細分化技術性等。
抗共震
步進電機系統軟件的一點不夠就取決于存有著原有的共震點,SR系列產品步進驅動器全自動測算共震點,并為此來調節控制系統,進而達到抑制共震的目地,巨大的提升了高頻可靠性,促使髙速時有更大的扭矩輸出,更出色的髙速特性。
交流伺服電機運行十分穩定,即便在低速檔時也不會出現震動狀況。交流伺服控制系統具備共震抑止作用,可填補機械設備的剛度不夠,而且系統軟件內部具備頻率分析功能(FFT),可檢驗出機械設備的共震點,有利于系統軟件調節。
震動抑止
伺服控制系統的震動抑止作用包括共震抑止及減振減震2個一部分。
共震抑止作用
出示2組陷波濾波器(NotchFilters),合理地擺脫因為機器設備機械系統原有特點導致的共震難題。
減振減震作用
可根據調整控制板出示的阻尼比改進全部內分泌系統的減振特點,進而合理減少系統軟件的震動。
三、矩頻特點不一樣
步進電機的輸出扭矩隨轉速比上升而降低,且在較高速旋轉時候驟降,因此 其最大工作中轉速比一般在300~600RPM。交流伺服電機為恒扭矩輸出,即在其額定值轉速比(一般為2000RPM或3000RPM)之內,都能輸出額定值轉距,在額定值轉速比之上為恒輸出功率輸出。
同樣規格下的伺服電機與步進電機的速率扭矩特點較為
同樣規格下的伺服電機與步進電機的速率扭矩特點較為
四、負載工作能力不一樣
步進電機一般不具備負載工作能力。交流伺服電機具備極強的負載工作能力。以M2交流伺服控制系統為例子,它具備速率負載和轉距負載工作能力。其較大 轉距為額定值轉距的二到三倍,可用以擺脫慣性力負荷在起動一瞬間的慣性力矩。步進電機由于沒有這類負載工作能力,在型號選擇時以便擺脫這類慣性力矩,通常必須選擇很大轉距的電動機,而設備在一切正常工作中期內又不用那么大的轉距,便出現了扭矩消耗的狀況。
五、運作特性不一樣
步進電機的操縱為開環控制,起動頻率過高或負荷過大易出現失步或匝間的狀況,終止時轉速比過高易出現過沖的狀況,因此 為確保其線性度,應解決好升、減速難題。交流伺服電機驅動器系統軟件為閉環控制系統,控制器可立即對電機編碼器意見反饋數據信號開展取樣,內部組成部位環和速率環,一般不容易出現步進電機的失步或過沖的狀況,操縱特性更加靠譜。
六、速率回應特性不一樣
步進電機從靜止不動加快到工作中轉速比(一般為每分好幾百轉)必須200~400ms。交流伺服控制系統的加快特性不錯,以東么川400W交流伺服電機為例子,從靜止不動加快到其額定值轉速比3000RPM僅需幾ms,可用以規定迅速起停的操縱場所。
總的來說,交流伺服控制系統在很多特性層面都好于步進電機。但在一些規定不太高的場所也常常用步進電機來做實行電機。因此 ,在自動控制系統的設計過程時要綜合性考慮到操縱規定、成本費等各個方面的要素,采用適度的操縱電機。
- 上一篇:86步進電機詳細參數
- 下一篇:伺服電機和伺服驅動器選型方法
產品推薦:兩相步進電機



產品推薦:無刷電機







產品推薦:兩相步進驅動器






產品推薦:直流無刷驅動器






 地址 ADDRESS
地址 ADDRESS